26 November 2019
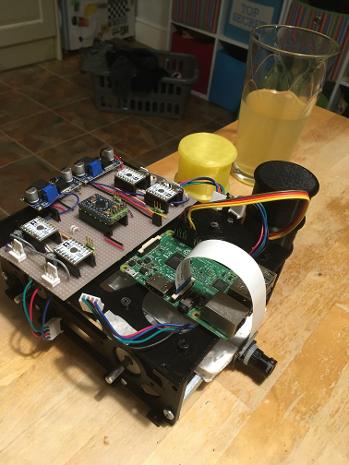
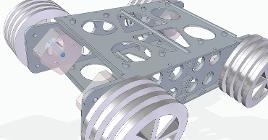
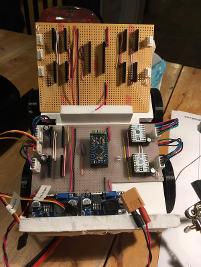
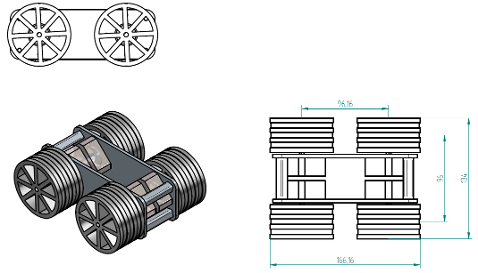
Hooray! The core stepper board almost complete.
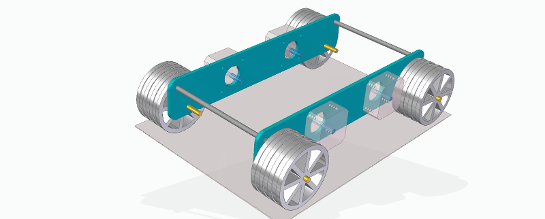
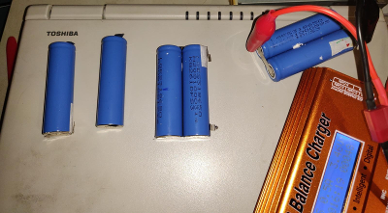
Powered by a 3S 11.1V Lipo and using a Pro Mini in the centre driving 4 stepper drivers.
The SMPS (Switch Mode Power Supply) also supplies the RC receiver and runs at 6v.
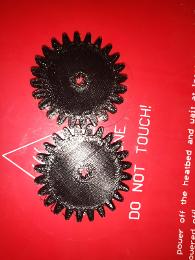
However each stepper needs 1A and the SMPS is struggling to start up. Hence only 2 wheels being driven in this video.